Project Overview
Our interdisciplinary team is developing an innovative surgical robotic system that combines macro-micro coordination, force sensing, haptic feedback, and image-guided navigation with a focus on affordability, scalability, and real-world clinical utility.
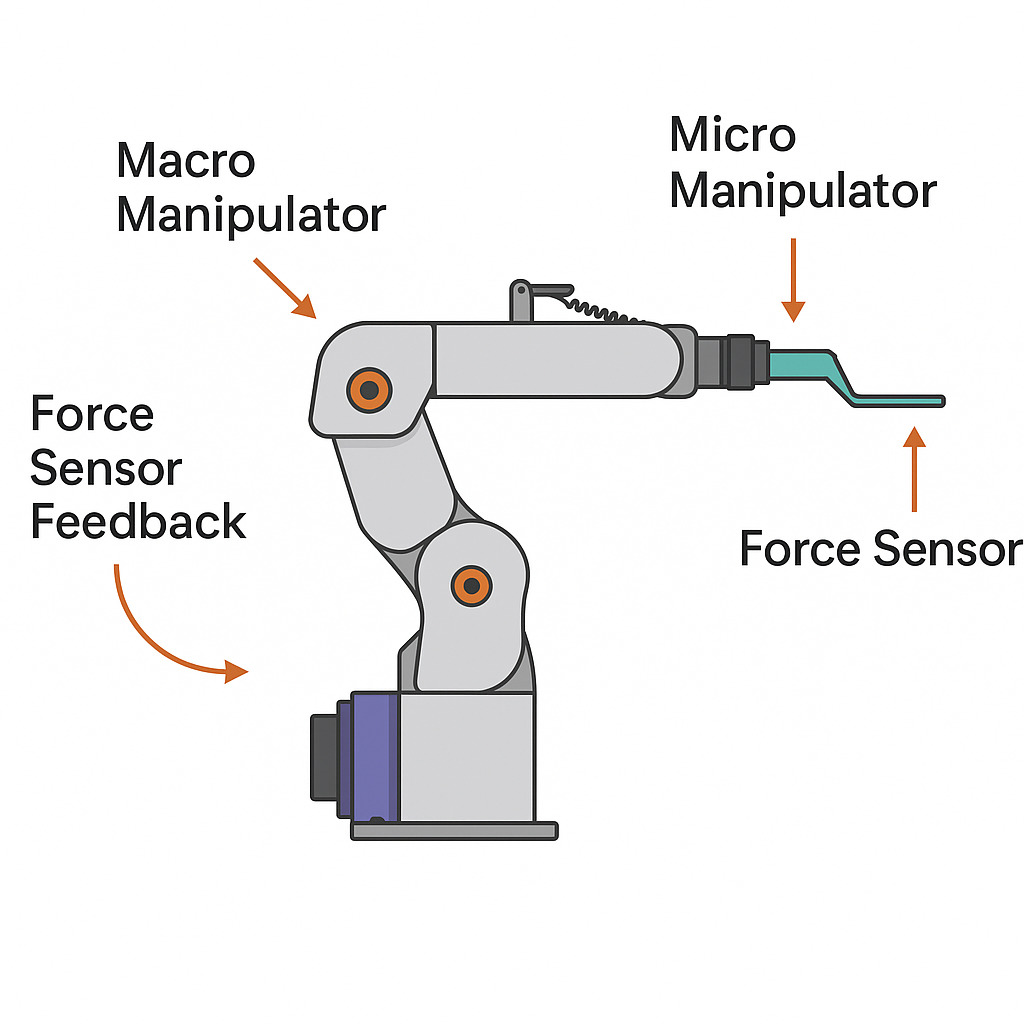
Diagram showing force feedback from macro to micro manipulators
🎯 Precision Engineering
Advanced macro-micro coordination systems that harmonize large-scale robotic arms with micro-surgical tools for unprecedented precision.
🤲 Haptic Feedback
Real-time force sensing and haptic feedback systems that provide surgeons with enhanced tactile awareness during procedures.
🗺️ Image-Guided Navigation
AI-assisted visualization and navigation systems for high-precision targeting and improved surgical outcomes.
💰 Accessible Technology
Designed specifically for low-resource environments with modular, cost-effective components that don't compromise on quality.
Current Progress
Track our latest achievements and research milestones as of July 2025
Literature Review Complete
Completed comprehensive reviews across key domains including haptic feedback, force sensing, surgical navigation, and in vivo testing methodologies.
Synthesis Report Complete
Summarized extensive research findings into actionable design strategies and comprehensive system recommendations.
Project Infrastructure Complete
Established research guidelines, Slack workflow systems, and comprehensive project management tools including timeline and milestone tracking.
Team Building Ongoing
Actively recruiting volunteers and completed onboarding materials to help new team members contribute effectively from day one.
Project Management Complete
Implemented comprehensive tracking systems with timeline management, milestone monitoring, and volunteer task assignment protocols.
Featured White Paper New
Explore our latest research summary on force sensing in surgical robotics based on 20 peer-reviewed publications.
View Full White Paper
Join Our Research Initiative
We welcome new contributors interested in research, CAD design, simulation, or fabrication. Whether you're a student, engineer, or researcher passionate about surgical robotics, there's a place for you on our interdisciplinary team.
Areas of Contribution:
Research & Literature Review • CAD Design & Prototyping • Simulation & Control Systems •
Fabrication & Testing • Project Management • Technical Documentation
Connect with us through the #surgical-robots Slack channel to get involved and start contributing to groundbreaking surgical robotics research.
Sign Engagement Letter